Current Year
CenterStage (2023-2024)
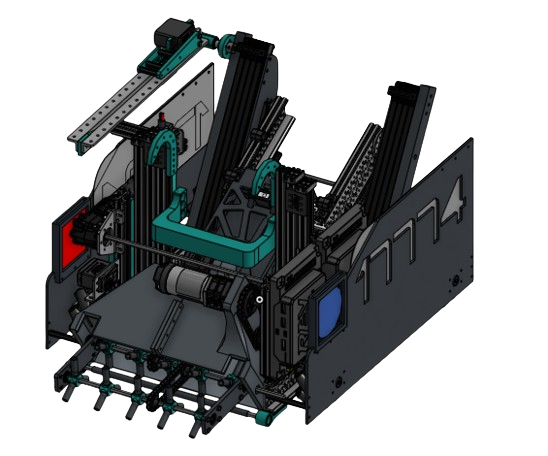
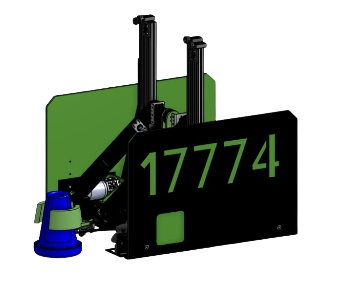
In the front of the robot, there is a well designed intake utilizing surgical tubing on a roller to grab two pixels and transfer them to the bucket. After the pixels are in the bucket, they get detected by two color sensors which present the color on the controllers's LEDs for the drivers. Once the drivers give the command, the bucket is swung over and lifted to the right height to drop off the pixels on the backboard.